2021年07月12日配信

この 『制御工学のない社会』 では、制御に関するトピックが実社会でどのように適用されるかを知ることができるように構成しております。
これらの一見、無味乾燥で役に立たないように見える制御トピックが 誰かの制御工学に関する関心を持つべきキッカケになることを願っています。
一般的に制御システムの分野では、ほとんどすべてのものが制御によって動かされていることが動機となっています。
車、電話、炉、コンピュータから、電力や水道などの主要な公共施設に至るまで、制御システムがなければ、現代の世界は粉々?!になってしまいます。
これらのシステムがどのように機能し、どのように設計されているかという基本的なことを知ることで、現代世界のレバーを押したり引いたりするシステムの
裏側を垣間見ることができます。 また、エンジニア職の面接でも大いに役立つかと思います。
 開ループ制御と閉ループ制御
開ループ制御と閉ループ制御
[ 開ループ ]
開ループ制御を使っている身近なアプリケーションは・・・
TVのリモコン 、 自動洗濯機 、 自動販売機 や 信号機などです。
[ 閉ループ ]
開ループ制御を使っている身近なアプリケーションとは・・・?
エアコン 、 冷蔵庫 、 トースター や 電気コタツなどです。
さて、上記のアプリケーションの制御の違いとは一体なんでしょうか。
自動制御は制御方式により、 閉ループ制御(フィードバック制御) と 開ループ制御 の2 つに大きく分類することができます。
開ループ制御と閉ループ制御の概念は、かつては産業界で使用されている2種類の制御システムを紹介するために教えられていましたが、
最近ではこの2つのアプローチが、現代の制御システムのほとんどが閉ループである理由を如実に表しています。
では、実際には使われていない開ループシステムについて学ぶ必要があるのでしょうか?! はい。あります。
基本的に、開ループシステムはすべての閉ループシステムの一部と考えていいかと思います。
つまり、開ループの応答を見ることで、システムとその制御に対する反応について多くのことを学ぶことができます。
下記では、開ループ と 閉ループのシステム構造について少し説明します。
ーーーーーー 開ループ(フィードフォワードコントローラ)の典型的な例 ーーーーーー
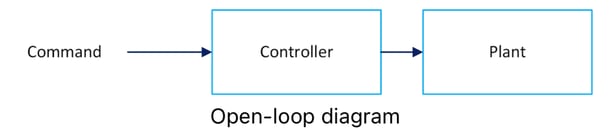
上記の図は、ユーザーからコントローラへの設定値の流れを表しています。
コントローラは、システムのモデルに関する知識に基づいて、プラントに送信する適切なコマンドを決定します。
その入力は、プラントの入力に直接送られます。開ループ制御の代表的なものに、シーケンス制御があります。
シーケンス制御とは「あらかじめ定められた順序に従って制御の各段階を逐次進めていく制御」をいいます。
例えば、講義室の温度を制御する場合、部屋に人が入るたびに、熱力学モデルに基づいてヒーターに送られる電流を増加させ、
人が帰るたびに電流を減少させることができます。理想的には、部屋の実際の温度を追跡するための温度センサーは必要ありません。
しかし、これがうまく機能するのは、講義室にいる全員の身長と体重がほぼ同じである場合に限られます。
子供は、教室に駆け込んできた学生ほど部屋の温度を上げないでしょう。
制御しているシステムの状態を直接測定することができれば、システムのモデルがどのようなものであっても、また外乱が混入していても、
システムへの入力を適切に変更することができます。
ーーーーーーーーーーーー 閉ループの典型的な例 ーーーーーーーーーーーー
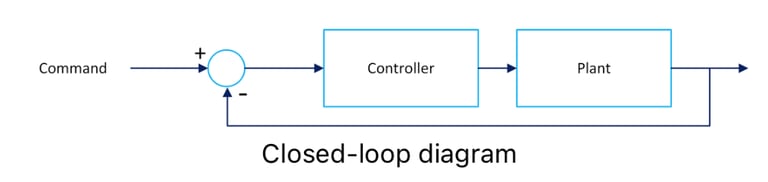
開ループの図を上の図と比較すると、主な違いは、プラントが行っていることの測定値を出力し、それがフィードバックされて
ユーザーからのコマンドと比較されていることがわかります。ほとんどの場合、フィードバック項はコマンドから減算され、コントローラを最小のエラーに
向けて駆動します。これは負帰還(ネガティブフィードバック)と呼ばれ、正帰還(ポジティブフィードバック)が使用される特殊な状況を除いては、
閉ループ制御システムを構築する方法です。
下記のシミュレーション工場は、テーピングマシンにコンベアとアームシステムを組み合わせて構成されています。
閉ループ制御の工場では、コンベアは一定の速度で動き、アームは箱が所定の位置に来たことを感知するまで待機します。
その後、アームが箱を取りに来て、安全にパレットに届けてくれるのです。
開ループ制御の工場では、駆動系の摩耗や箱の重さなどの理由で、コンベアの速度は一定ではありません。
また、アームは、アームが到着したときに箱がローディングゾーンに現れることを想定して、前後に走るように指示されています。
このようなケースでは、明らかにうまくいきませんね💦
【閉ループ制御】 【開ループ制御】
開ループ・システムの利点は、システムが測定ノイズや不安定性の影響を受けにくいことです。
不安定性とは、システムが本質的におかしくなってしまう可能性のことで、今後のモジュールで説明したいと思います。
開ループシステムの欠点は、設計に固有のものです。
適切な変化をもたらすためにプラントに送る入力を正確に生成するには、システムがどのように動作するかの完全に正確なモデルが必要です。
閉ループシステムはロバスト性に優れていますが、皮肉にもシステムに制御不能な動作を引き起こす可能性があり、また測定ノイズにも
弱いという欠点があります。
まとめると
開ループ制御システムは、プラントのモデルとユーザーからの指令に基づいて、プラント(制御対象)に入力を送ります。
閉ループ制御システムは、プラントの測定状態とプラントの望ましい状態の差に基づいて、プラントに入力を送ります。
指令に基づく開ループさん と 望ましい状態を考慮する閉ループさん
人の性格のようで、色々比較すると面白いですね。
ちなみに私は閉ループタイプかもしれません。
やはり、制御工学のない世界は考えられませんね😆
我々の会社では制御工学を学ぶ事が出来る製品を提供しています。
下記画像をクリックして製品の詳細をご確認下さい。
※ 言葉の説明
【反応】制御システムの応答とは、システムに外乱が加わったときの動的挙動の特徴を指す。
【設定値】セットポイントとは、プラントの望ましい動作を表すパラメータ、またはパラメータのセットのことです。
これらのパラメータは、通常、制御システムの入力として提供される。
【ロバスト性】システムが様々な外乱や不確実性に対してどれだけ耐性があるかを示す指標。
【測定ノイズ】測定ノイズとは、プラントの現在の状態を表すコントローラに送られる信号のノイズです。
このノイズは、センサーや電気システムなど、さまざまな原因で発生します。
※この内容はQuanser社の無料アプリ『 Experience Control 』を日本語訳した内容を引用しております。
ご不明点、ご興味ある方は是非、Quanser社の無料アプリ『 Experience Control 』ダウンロードお願いします。

★お詫び★
Quanser社の取り扱い代理店になり、大人になってから制御工学の存在を知った者がこのブログを書いてます。
学びながらの個人ブログとなっておりますのでご理解の程お願いいたします。
ご指摘ございましたら、是非ご教授くださいませ~! いつでもお声がけください♪
子供たちに制御工学の存在を知ってもらい、楽しんでもらう事を第一に考えております。
SNS始めました
 |