QCar2

QCar 2は、学術的な自動運転構想のために設計されたオープン・アーキテクチャの1/10スケール車両で、自動運転車スタジオの主力車両である。
学術的な自動運転構想のために設計されたオープン・アーキテクチャの1/10スケール車両です。
パワフルなNVIDIA Orin AGXによって駆動され、包括的な慣性センサー、視覚センサー、測距センサーが搭載されており、研究、教育、アウトリーチを次のレベルに引き上げるように設計されています。
ご興味ある方は是非下記の『PRODUCT INFO SHEET』を参照ください。
PRODUCT INFO SHEET
RESEARCH RESOURCES
SDSC CONTENT GUIDE
RESEARCH GUIDE
製品情報
- Dimensions
- 39 x 19 x 20 cm
- Weight (with batteries)
- 2.7 kg
- Power
- 3S 11.1 V LiPo (3300 mAh) with XT60 connector
- Onboard computer
-
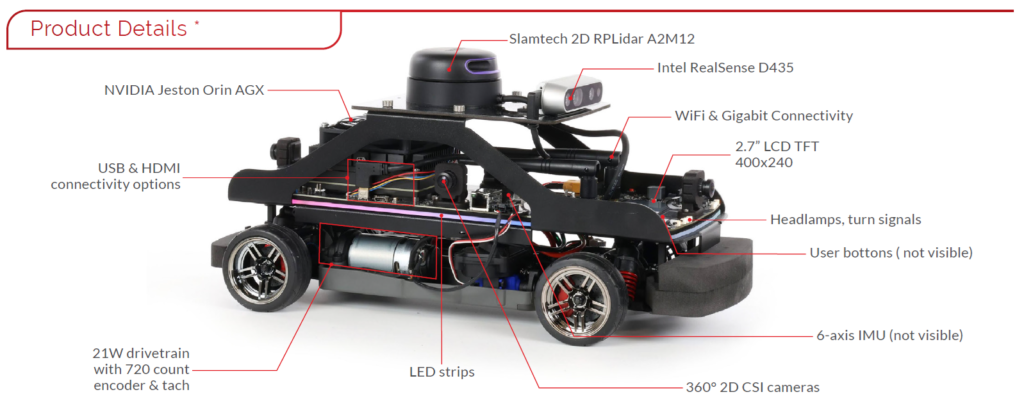
NVIDIA Jetson Orin AGX
- GPU: 930 MHz 1792-CUDA/56-TENSOR cores
- CPU: 2.2 GHz 8-core ARM Cortex-A78 64-bit
- NVIDIA Ampere GPU architecture 200 TOPS
- Memory: 32GB 256-bit LPDDR5 @ 204.8 GB/s
- Lidar
- LIDAR with 16k points, 5-15 Hz scan rate, 0.2-12m range
- Cameras
-
- Intel D435 RGBD Camera
- 360° 2D CSI Cameras using 4x 160° FOV wide angle lenses, 21fps to 120fps
- Encoders
- 720 count motor encoder pre-gearing with hardware digital tachometer
- IMU
- 6-axis IMU (gyroscope & accelerometer)
- Safety features
-
- Hardware ‘safe’ shutdown button
- Auto-power off to protect batteries
- Expandable IO
-
- 2 user PWM output channels
- 3 user buttons
- Motor throttle control
- 2 general purpose 3.3V high-speed serial ports*
- Steering control
- 2 unipolar user analog input
- 11.8V I2C port (up to 1 MHz)*
- 1 3.3V I2C port (up to 1 MHz)*
- motor current analog inputs
- 2 CAN bus interfaces (supporting CAN FD)
- 3 encoder channels (motor position plus up to two additional encoders)
- 1 USB port
- 1 USB-C host port
- 1 reconfigurable digital I/O
- 1 USB-C DRP
- Connectivity
-
- Wi-Fi 802.11a/b/g/n/ac 867 Mbps with dual antennas
- 1x HDMI
- 1x 10/100/1000 BASE-T Ethernet
- Additional QCar features
-
- Headlamps, brake lights, turn signals and reverse lights
- Dual microphones
- Individually programmable RGB LED strip (33x LEDs)
- Speaker
- 2.7” LCD TFT 400×240 for diagnostic monitoring
- Supported Software and APIs
-
- QUARC for Simulink®
- VPI™
- Quanser APIs
- GStreamer
- Jetson Multimedia APIs
- Python™ 2.7 / 3 & ROS 2
- Docker containers with GPU support
- CUDA®
- Simulink® with Simulink Coder
- cuDNN
- Simulation and virtual training environments (Gazebo and Quanser Interactive Labs)
- TensorRT
- OpenCV
- VisionWorks®
- Multi-language development supported with Quanser Stream APIs for inter-process communication
※Subject to change